

服务
蛇形机器人变身“多脚蛇”:可抱紧物体向上滚动
蛇形机器人一直是卡内基梅隆大学(CMU)机器人实验室最引人注目的项目之一,早在十年前,CMU的仿生机器人实验室就开始了该项目的工作,并在两年后研发出了第一台可自主移动的蛇形机器人。
这些机器人依据仿生学原理设计,体型瘦而长,头部装有相机,适合在狭小空间作业,如进入人类无法到达的区域进行搜索和救援。

尽管机器人的商业转型非常成功,但CMU的研究人员更关注它在科研上的作用,他们认为,蛇形机器人会是机器人研究领域的一个突破口。

在过去十年中,大大小小的机器人社区风靡美国,机器人爱好者们仿照乐高机器人的搭建方法,在蛇形机器人中引入模块化组合方式,甚至设计出了即插即用的机器人执行器。
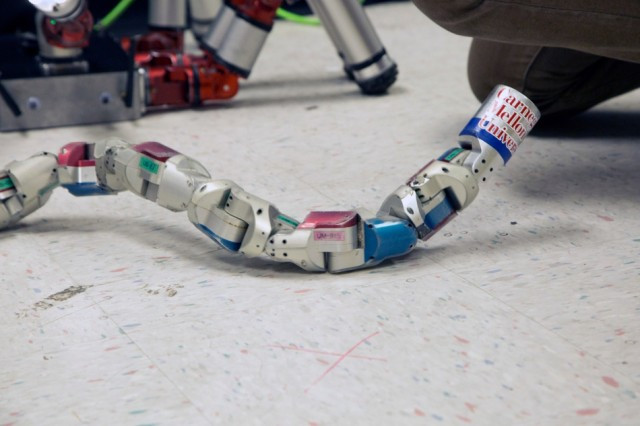
在最新版本的CMU蛇形机器人中,研究人员采用了模块化概念,在各关节部位安装压力传感器,机器人能感知力度,缠绕住物体后可紧贴向上移动,省去了根据环境预编程移动路径的麻烦。
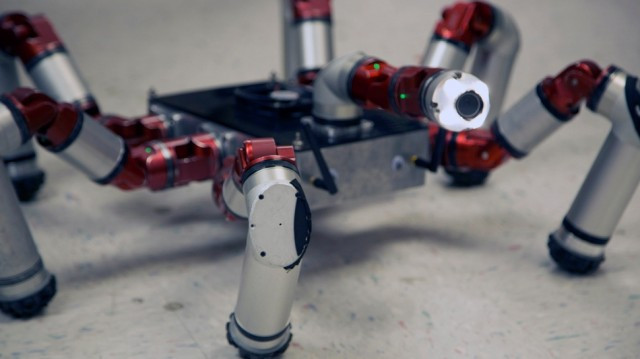
模块化设计的一大优点是可以任意增加、减少互换组件来改变机器人的长度,这扩大了机器人的适用范围,但显然研究人员的脑洞不止于此。如今在匹兹堡实验室中的机器人“蛇”长出了不少“腿”,这使它看起来更像一只金属昆虫或甲壳类动物。

研究人员称它为“蛇怪”。它沿用了原蛇形机器人的“头部”和“腿部”,只是改变了组合方式。较之蛇形机器人,“蛇怪”的身体构造为电源和其他内部组件提供了更多空间,这意味着机器人的每个关节都将变得更灵活,可以不受限制地走动。
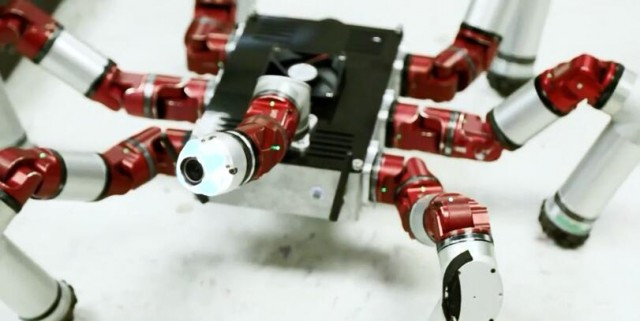
同时,“蛇怪”内置压力传感器,即使“长”了六条腿,它同样可以抱紧物体向上滚动。“蛇怪”没有配备视觉传感器,也不支持路线编程规划,它完全仿照动物与环境的交互方式,根据状态变化不断调整自己以适应环境。
生活服务
还没有评论
,点击发布!













网友评论